赛事咨询
Moss为您解答
商务合作
Jarvis为您助力
赛事咨询
Moss为您解答
商务合作
Jarvis为您助力
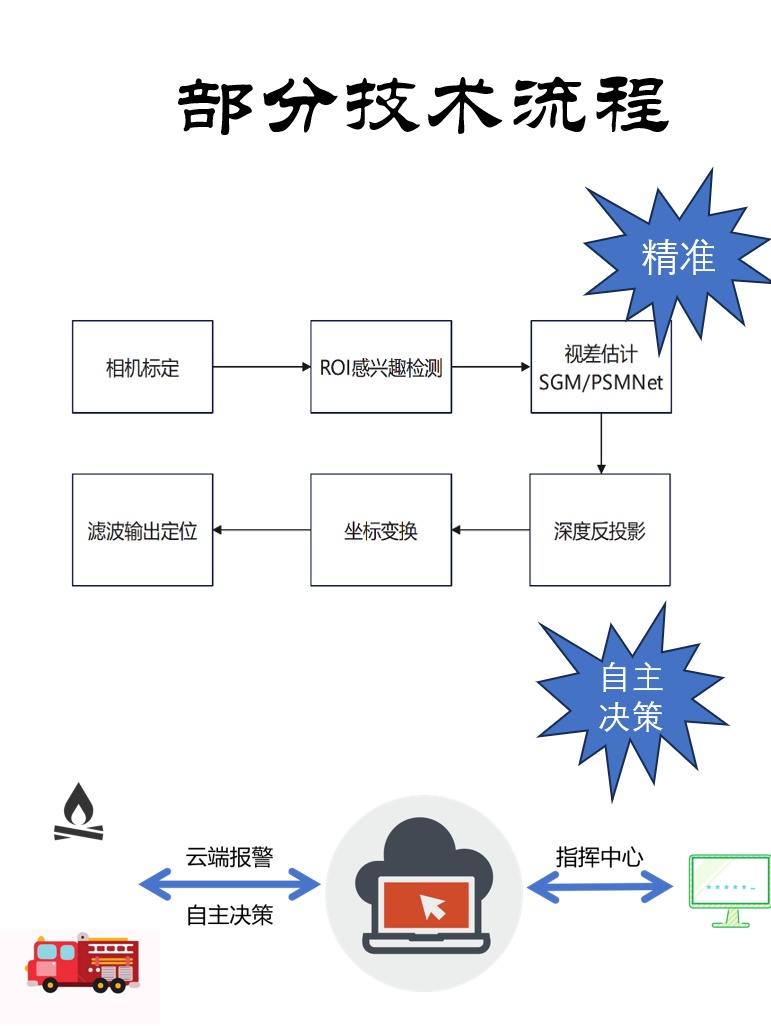
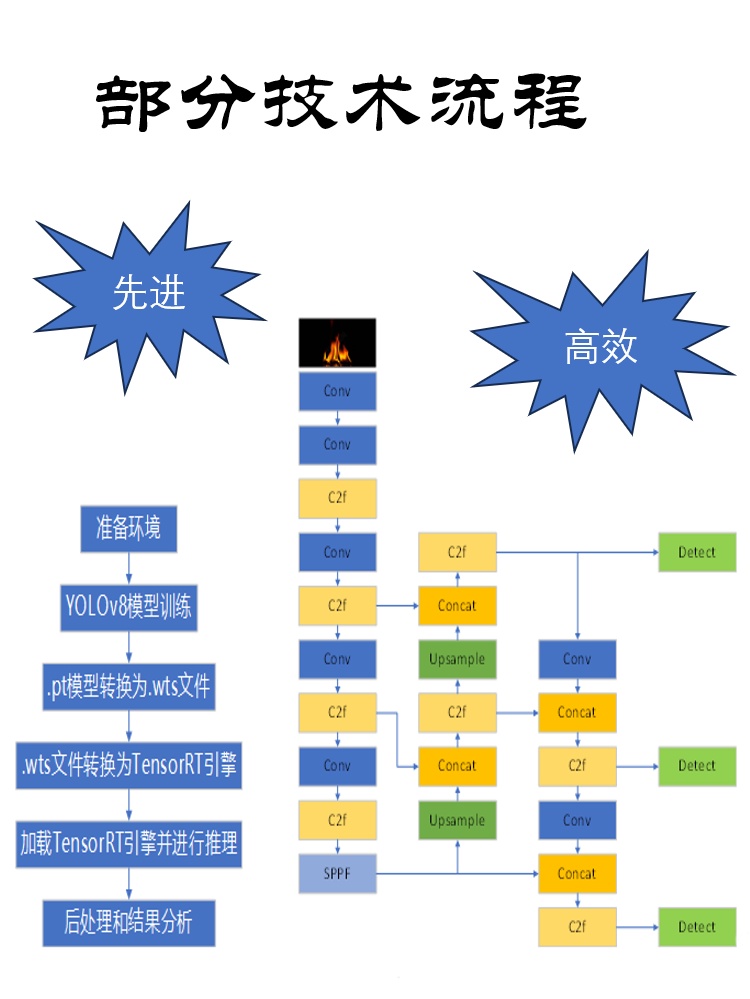
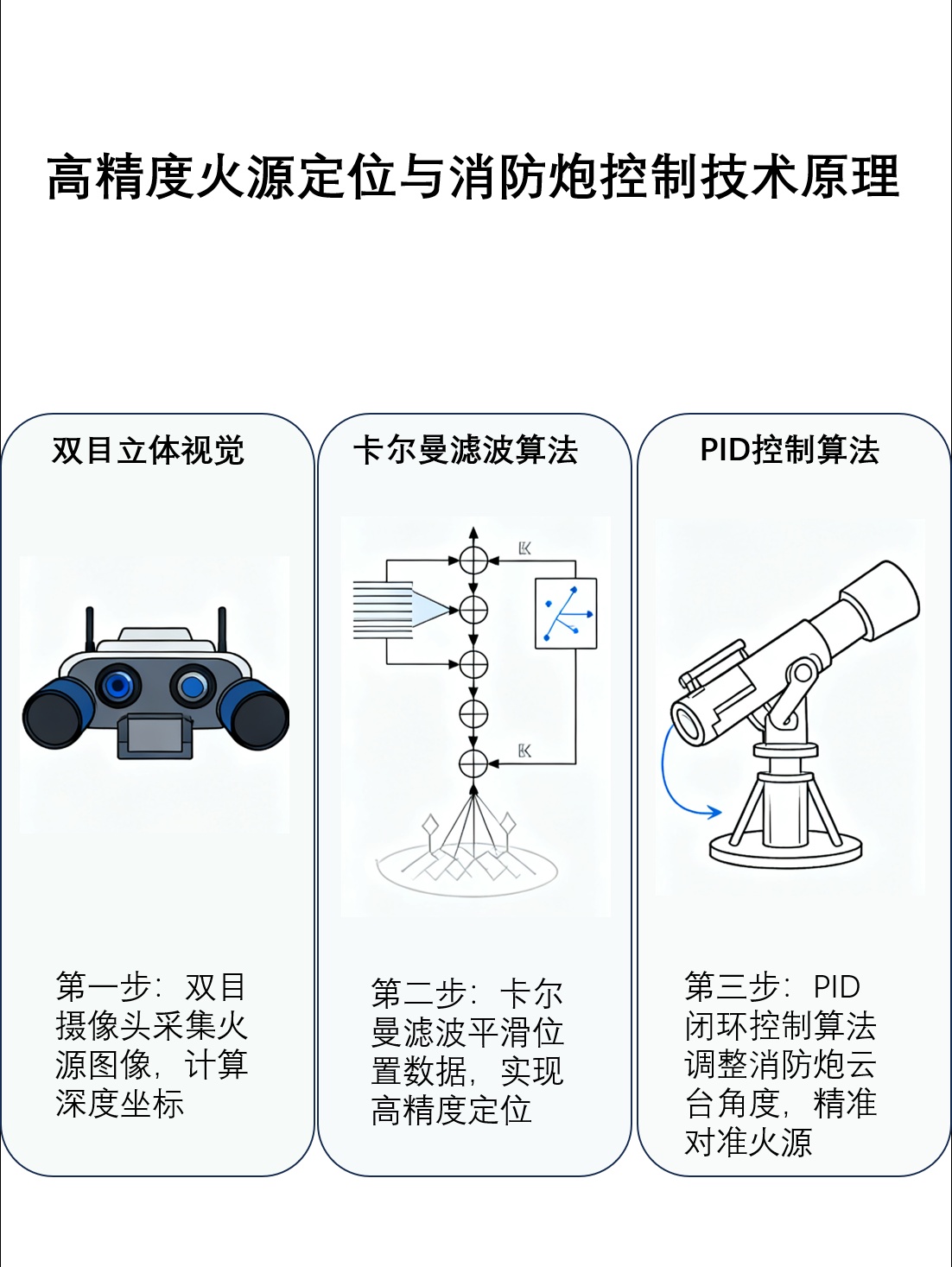
本项目设计并实现了一套端到端的上装总控系统,涵盖控制平台(Jetson Orin Nano)、双目可见光+红外火焰识别(YOLOv8)、立体视觉定位与滤波、云端MQTT/TLS报警与状态上传,以及二维云台PID闭环消防炮喷射控制,实现≤2s的实时响应、火焰检测误报率<10%与±10 cm的定位精度,并确保系统24h高可靠运行与模块化可扩展。该系统集成到无人车底盘和消防泵炮设备上,开发出了一款能够在复杂环境中自主巡检、精准灭火和远程监控的智能无人消防车。
 链接投资人/投资机构
链接投资人/投资机构 算力/API接口等技术支持
算力/API接口等技术支持